弊社は「デジタル画像と波形の協調検査環境」という独自技術を保有しております。 https://www.net-vision.co.jp/solution/img_system.html
この独自技術を応用して、画像とCAN(Controller Area Network)データを完全同期した装置を開発しました。構成としては、SerDesボードとSVシリーズボード、CAN-IFボードを組み合わせた形式になります。現在次のステップとして、LiDAR(ライダー)「light detection and ranging(光による検知と測距)」情報も取り込んで車全体のデータの収録、再生装置を構築中です。リリースはもう少し先になりますが、皆様のご意見を伺いたいので、少し早めにご案内いたします。
1.既存の接続
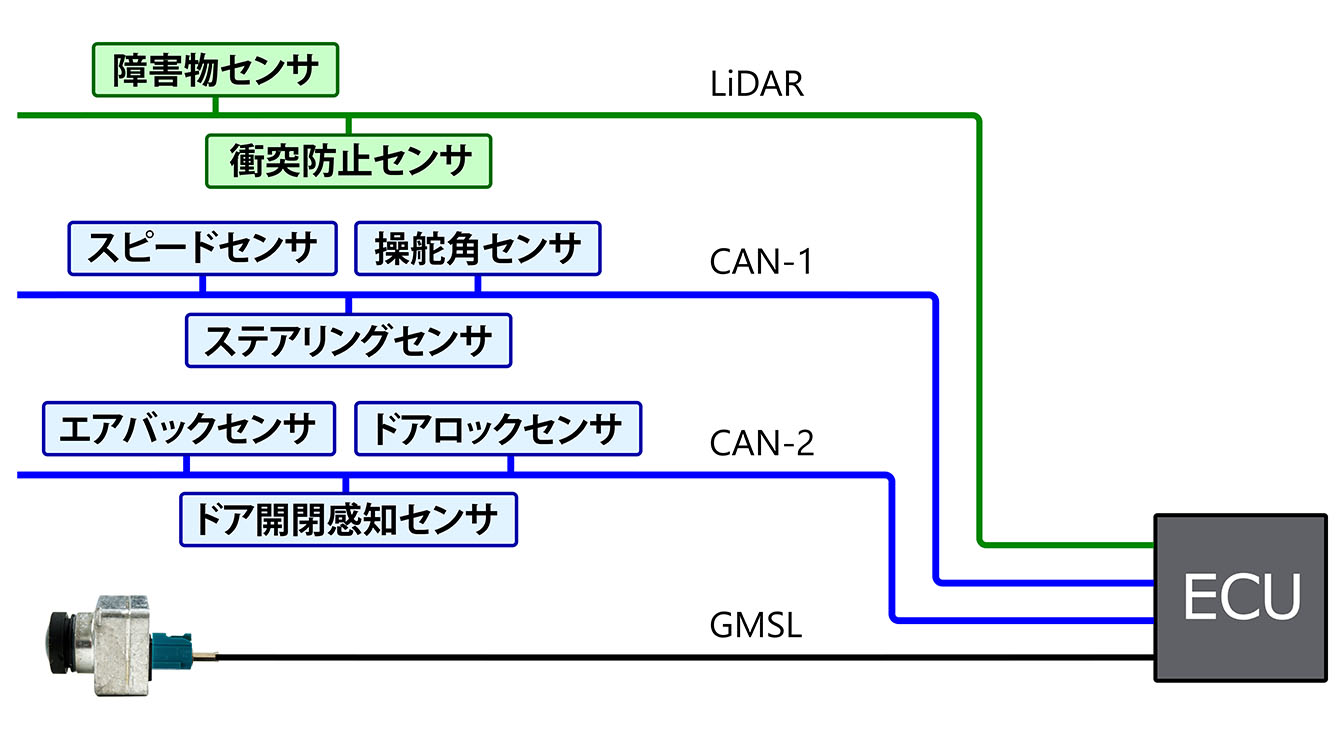
車の車内ネットワークは、LiDAR、CAN、SerDesで殆どが構成されております。今回SerDesは、Analog Devices社GMSLを使用した説明にしました。TI社FPD-LinkIII、Sony社GVIF2を使用しても同様のシステム構成を構築できます。ECUの機能により、SerDes部分は、単眼ではなく、ステレオ、4CH等色々なパターンの構築が可能です。LiDARはVelodyne LiDARを使用してテストしております。
2.データの保存
車内ネットワークデータを保存する場合、各データ間の同期が最重要となります。CAN、LiDARネットワークは、元々分岐可能なネットワークなので、特別な処理は不要です。しかし、SerDesの分岐は、専用の装置が必要となります。分岐に関しての概要は別ページをご参照ください。
https://www.net-vision.co.jp/solution/in-vehicle-camera.html
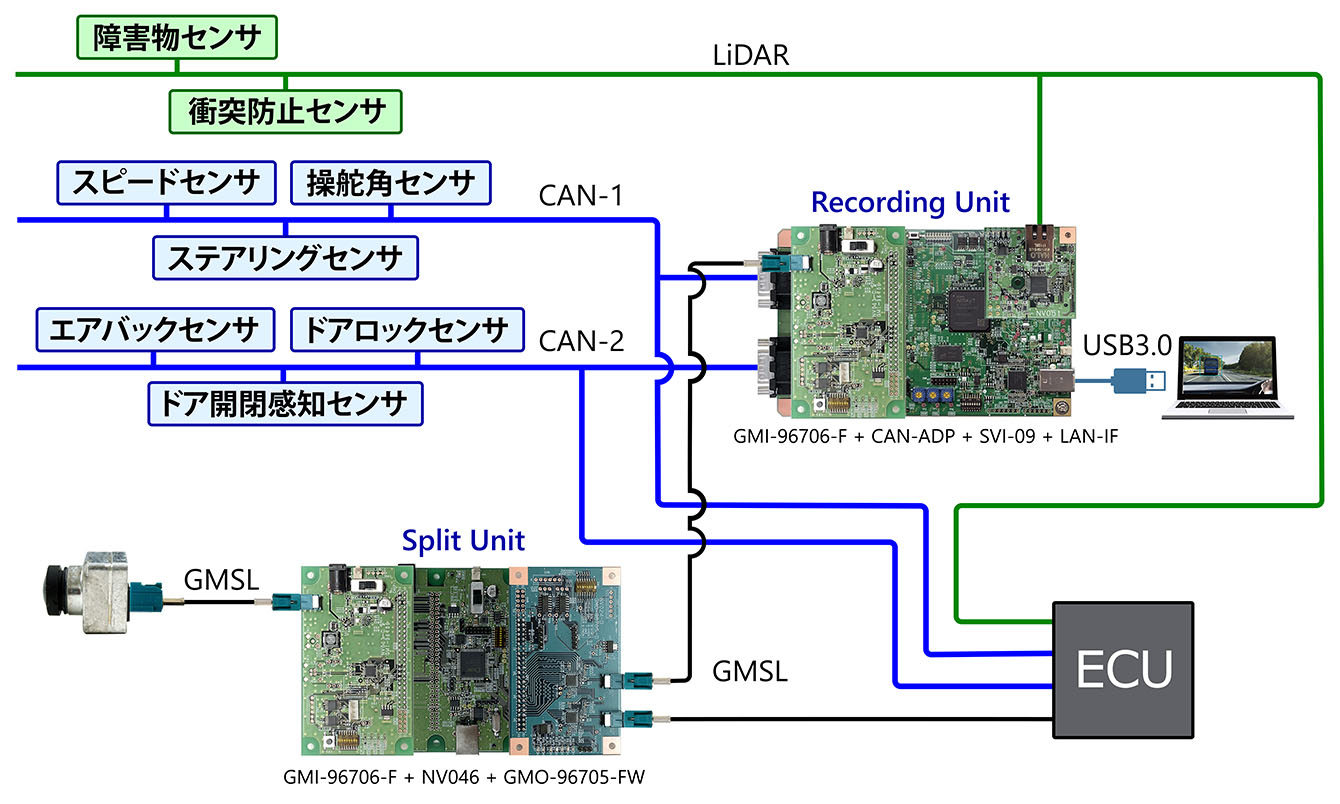
上図は、既存の車内ネットワーク内に、分岐ユニットと録画ユニットを埋め込んだ接続図になります。この構成でネットワークを構築すれば、ECUは間に録画ユニットが組み込まれた状態でも通常の動作が可能です。録画ユニットで収録したデータはPCに全て保存されます。
3.データの再生
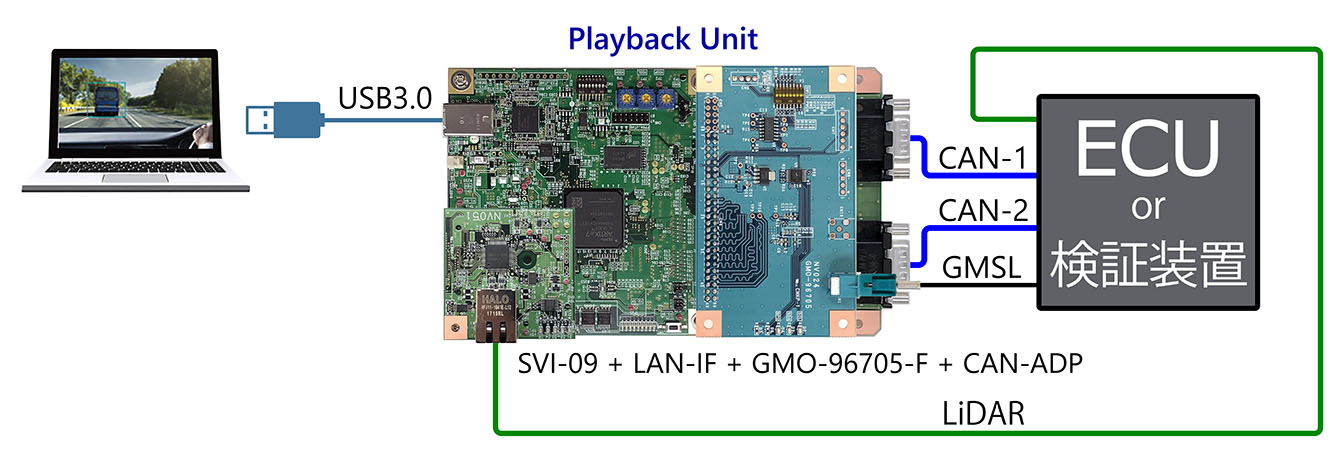
PCに保存されたデータは、上記の再生ユニットで再生可能です。それぞれのネットワークは、ECU等とのレジスタ設定などの設定処理が必要となります。
GMSLの場合は、GMO-96705-Fボード上にPICマイコンを搭載しております。このマイコンがECUとの初期設定を実施します。CAN、LiDARに関しては、垂れ流しになりますが、画像フレームに同期して、ECUに送り込むことが出来ます。
4、データ確認用アプリケーションソフトウェア
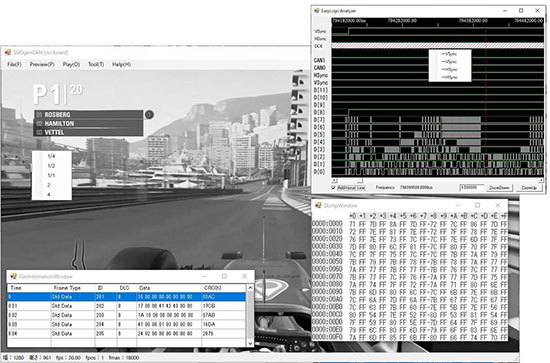
画像録画の際、CANデータは、画像のピクセルクロック単位で取り込みます。CANデータは、ブランキング中も取り込み、DATファイル形式でPCに保存されます。
この際に画像と画像波形、CANデータはリンクされておりますので、画像をクリックすると、そのピクセル部分の画像波形とCANデータが表示されます。
HSYNC、VSYNCでの表示切替も可能ですので、今までにない車載内通信デバッグ環境が構築できます。
現在はLAN-IFボードを使用した、LiDARを組み込んでいます。
5、CANエミュレーションボード:CAN-ADP
CAN-ADPボードは、1枚のボードでCANを2チャンネルサポートできます。使用する際は、各ボードの専用アプリ&FPGA&FWが必要になります。
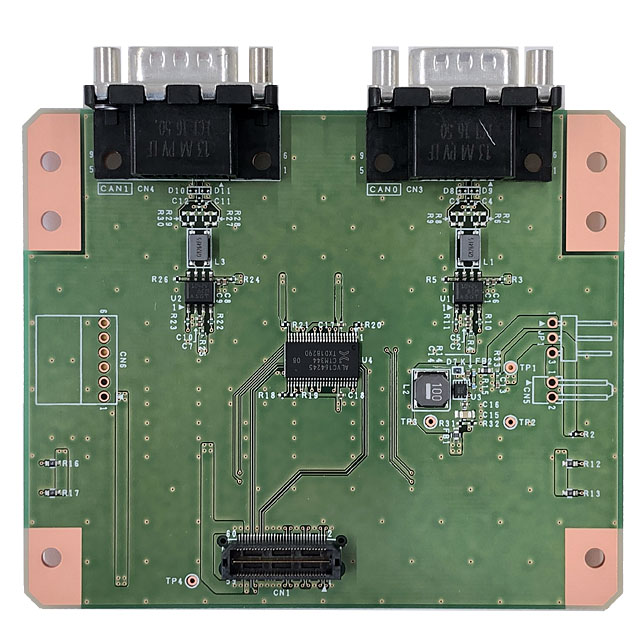
こちらはMIPI版となっております。
このボードは、MIPIジェネレータ SVO-03-MIPIボードと
MIPIモニターボード SVM-06ボードに接続可能です。
CAN-ADPボード NV045-A : MIPI版仕様書
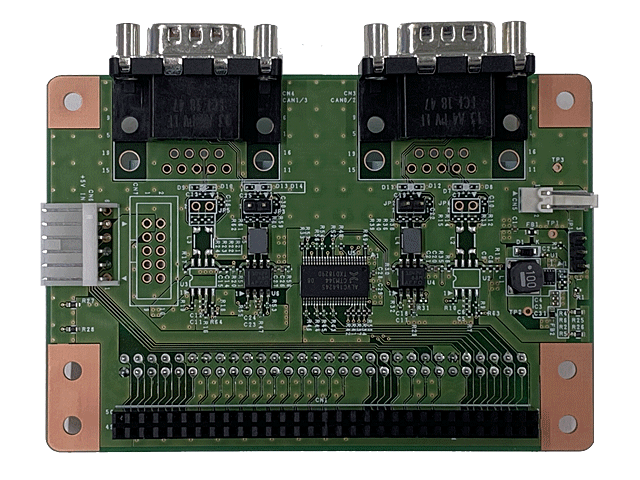
こちらはパラレル版となっております。
このボードは、イメージレコーダー SVI-09ボードに接続可能です。
CAN-ADPボード NV045-B : パラレル版仕様書
6、弊社独自技術
今回のシステム構成で使用している画像と車載データの同期手法は、弊社独自技術となります。画像と画像波形、データのリンク手法です。概要は下記のページをご参照ください。https://www.net-vision.co.jp/solution/debug_method.html
2020年9月 特許査定
2021年5月 国際公報に公開
注意事項:記載された商品名、社名は各社の商標です。本資料は仕様変更の為予告なく変更する場合があります