
都内の木々も徐々に色付き始めてきましたが、皆さま紅葉は見に行かれましたでしょうか?
私は地元の横浜で今年もいちょうを見てきました(^^)
前回のブログでは、SVP-01-UボードとGMI-96706-FHボードを接続してGMI-96706-FHボードにカメラを繋ぎ、撮影した画像をPCから確認しました。
今回はSVO-03の後継機種として近日中に発売予定のSVP-01-Gボードをカメラの代わりに使用して、PCから映像を確認してみたいと思います。
まず今回使用するボードについて簡単に説明いたします。
・
SVP-01-U:
製品詳細ページ
パラレルインタフェースの映像信号を表示・録画するためのボードです。
・
GMI-96706-F:
ハードウェア仕様書(PDF)
Maxim 社 GMSL 規格 で送信されるシリアル信号の映像をパラレル信号に変換し、弊社 SV シリーズのパラレル入力ボード(SVP-01-U/SVI-09)に接続して使用するための基板です。
・
SVP-01-G
USB 3.0かDisplayPortで入力される映像信号を、パラレル映像信号に変換・出力するためのカメラエミュレーションボードです。
・
GMO-96705-F:
ハードウェア仕様書(PDF)
パラレル形式で入力された映像信号を GMSL 信号に変換するための基板で、SVO-03 基板と組み合わせることで、GMSL カメラのエミュレーションとしての機能をもちます。
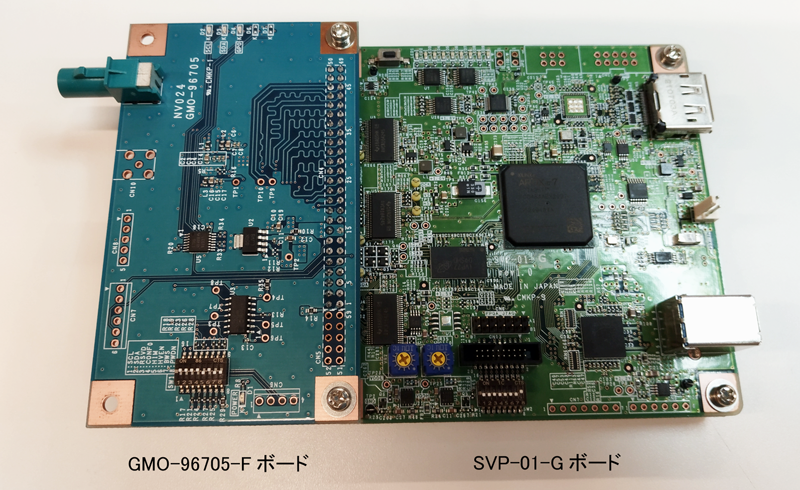
SVP-01-GボードとGMO-96705-Fボードがカメラ📷の代わりになります。
SVP-01-Gボードは、SVO-03ボード同様、予め録画した画像やCGを、カメラモジュールやイメージセンサーの画像として画像処理機器に出力できます。現場で実車を使い走行データをとらなくても、録画した画像やCGさえあれば画像処理装置の開発が可能になるので、開発スピードを格段に上げることができます。
今回のボードの接続構成はSVP-01-G+GMO-96705-FとSVP-01-U+GMI-96706-Fの4枚です。
【準備するもの】
SVP-01-Gボード、
GMO-96705-Fボード、
SVP-01-Uボード、
GMI-96706-Fボード、
ノートPC、USBケーブル2本、FAKRAケーブル1本
1. ボード、ケーブル類、カメラを接続します。
・SVP-01-GボードにGMO-96705-Fボードを接続します。
・SVP-01-UボードにGMI-96706-Fボードを接続します。
・GMO-96705ボードのCN1とGMI-96706-FボードのCN1をFAKRAケーブルで繋ぎます。
2. ディップスイッチの設定をします。
DIPスイッチを以下の番号に合わせます。
SVP-01-Gボード → 8番をON(UVCモード)、GMO-96705-Fボード →1、2、3、4、6番をON
SVP-01-Uボード→8番をON(UVCモード)、GMI-96706-Fボード→4番をON
3. 電源を投入します。
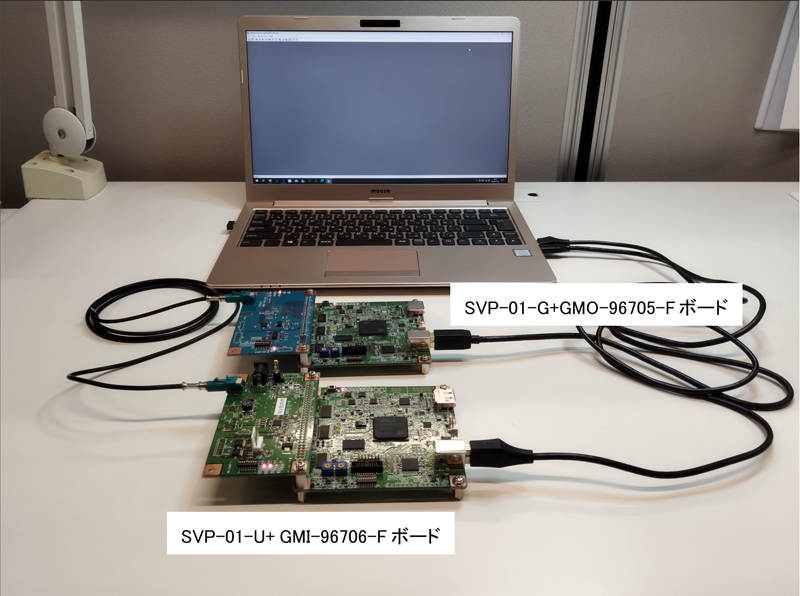
・SVP-01-GボードとPCをUSBケーブルで繋ぎます。
・SVP-01-UボードとPCをUSBケーブルで繋ぎます。
4. 送信側の設定を行います。 SVP-01-G+GMO-96705-Fボードより画像を送信します。
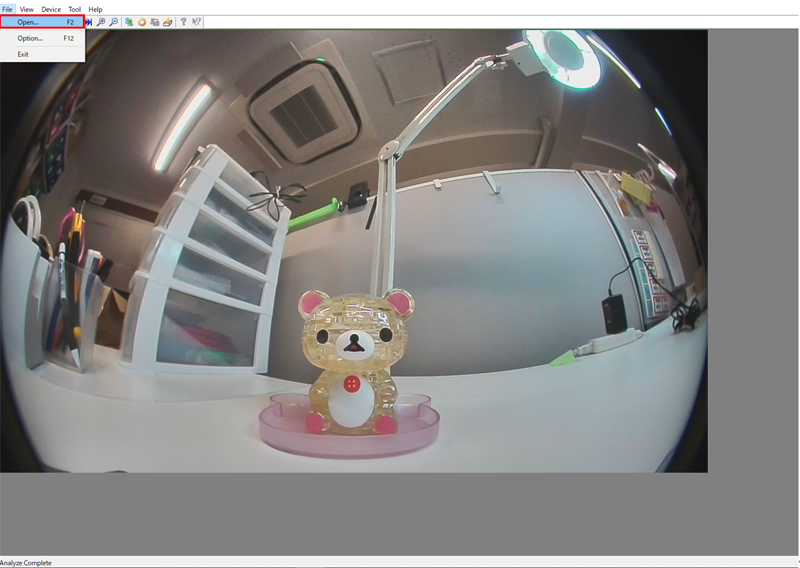
Appl_×64の中のSVOGeneratorを起動します。
・File-open
NVcapを使用して予め録画しておいたコリラックマちゃんの画像を開きます。
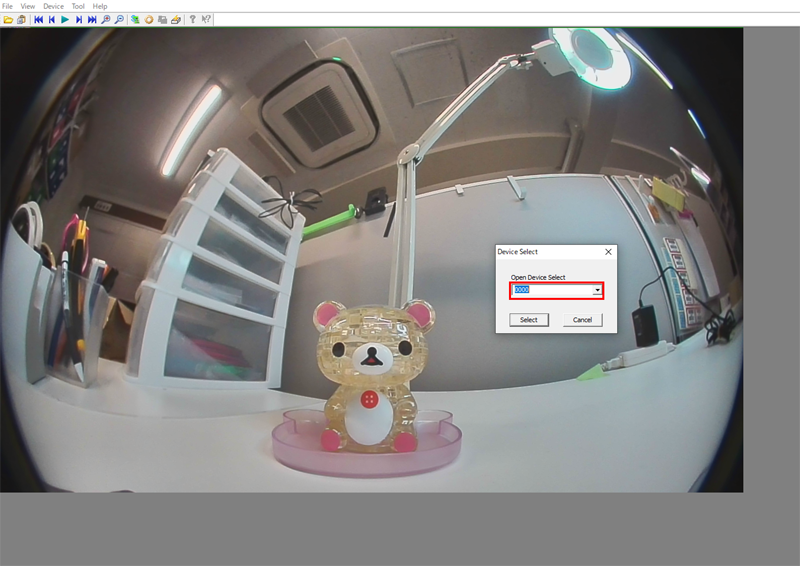
・Device-Select-0000を選択
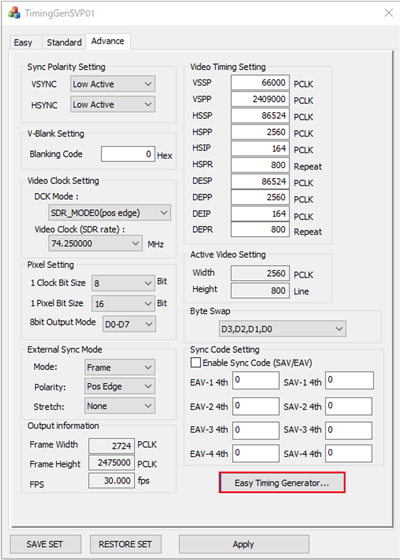
・Device-Setting
Easy Timing Generatorを選択
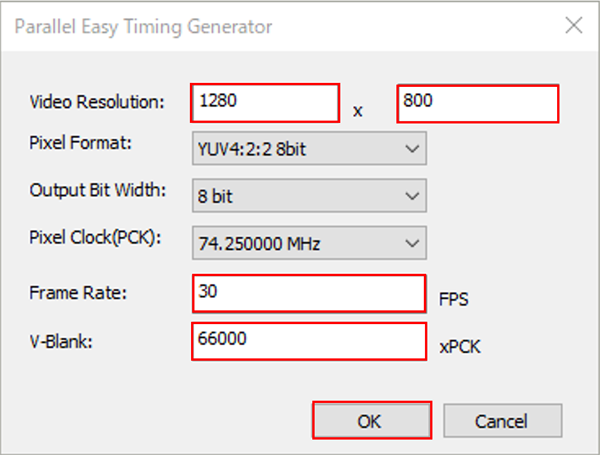
希望の画像サイズ、フレームレート、V-Blankを入力しOKを選択後、Applyを選択
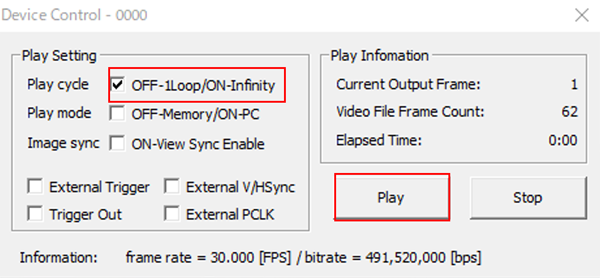
・Device-Control
Play Setting-Play cycle-OFF-1Loop/ON-Infinityにチェックを入れてPlayを選択
Playを押すと画像の送信が始まり、SVP-01-Uの4番、9番、SVO-01-Gの2番、7番のLEDが点滅し始めます。
5. 受信側の設定を行います。
SVボード用ソフトウェア「SVMCtl」で送信側に合わせた初期設定を行い、GMO-96705-F/GMI-96706-F用の設定ファイルを送ります。
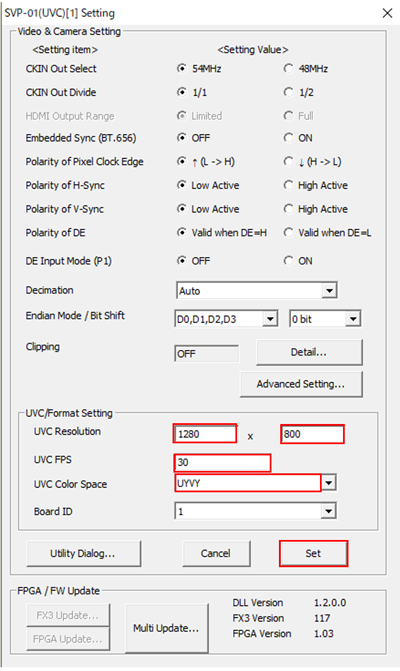
SVM Setting -UVC/Format setting
送信側で設定した画像サイズ:1280×800、フレームレート:30fps、UVC Color Space:UYVYを入力・選択し、Setを選択します。
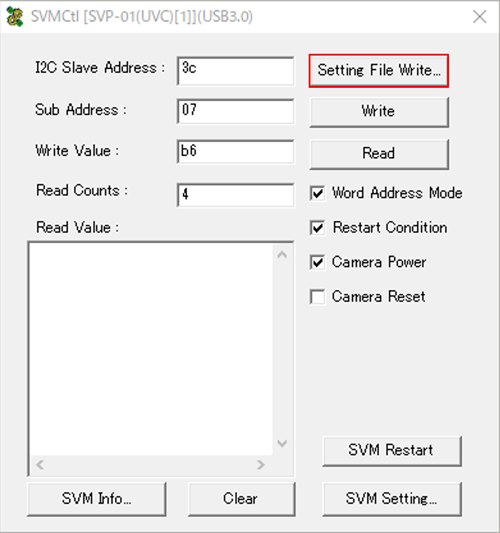
Setting file Writeを選択し、GMO-96705-F/GMI-96706-F用の設定ファイルを送信します。
5.1 設定ファイルについて
設定ファイルは、イメージセンサとSerDesデバイスへのI2C経由のレジスタ設定情報を含むスクリプトファイルです。シンプルなフォーマットで、メモ帳で編集も可能なため、誰でも簡単にレジスタ設定の調整が可能です。
弊社では、これまで動作実績のある設定ファイルを約300種保有しているため、お客様の使用デバイスでの出画を迅速にサポートできます。
6. UVCキャプチャソフト「NVCap」でPCから画像を確認します。
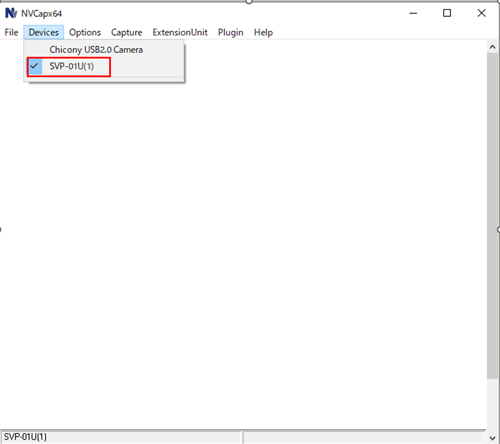
Appl_x64 の中のNVCapx64を起動させます。
・Devices - SVP-01-U( 対象ボード)を選択します。
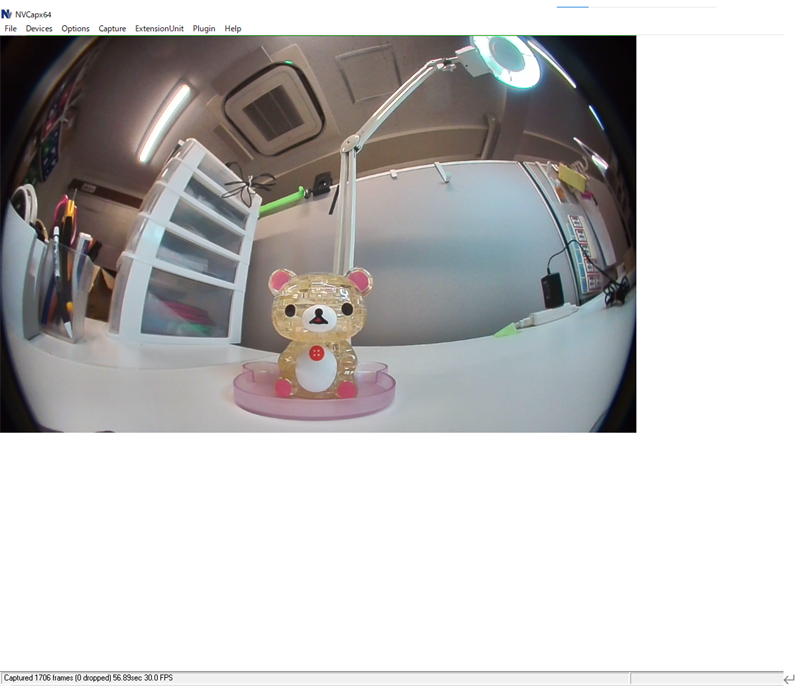
・Options - preview
⇒ 4.でSVP-01-G+GMO-96705-Fから送信したコリラックマちゃんが表示されました。
SVO-03とSVP-01-Gの違いについて
SVO-03とSVP-01-Gの大きな違いは、信号入力のインターフェースをHDMIからDisplayPortへ変更したところです。詳細については、製品リリース後にHP上にアップしますので、ご確認いただければと思います。
ご相談は
お問い合わせからご連絡をお願いいたします。
